The Challenge
Plant phenotyping research depends on inoculating large numbers of seedlings under identical conditions, but the traditional process is entirely manual. Researchers place a pipette by hand at the tip of each root, one by one, across hundreds of Petri dishes per experiment. This is not only time-consuming, but introduces human error: positioning varies between operators and sessions, which contaminates the experimental data and limits how confidently conclusions can be drawn.
Inoculating thousands of seedlings by hand takes days of researcher time per experiment. Hours that could be spent on analysis and interpretation.
Positioning varies between operators and sessions. Even small differences in where inoculant is applied introduce variability that contaminates experimental data.
The facility handles over 10,000 seedlings. Manual inoculation simply cannot keep pace with that throughput without significant staffing overhead.
The scale of the problem compounds the difficulty. The client’s facility processes up to 10,000 seedlings across more than 2,000 Petri dishes. At that volume, manual inoculation is simply not viable as a long-term approach, It consumes researcher hours that could be spent on analysis, and the inconsistency it introduces undermines the scientific value of the experiments.
What We Built
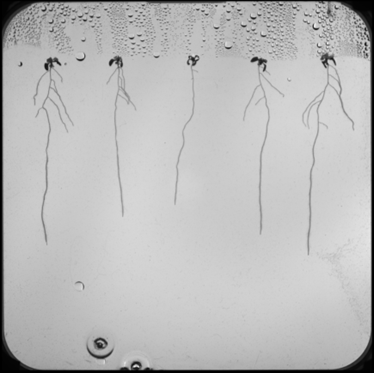
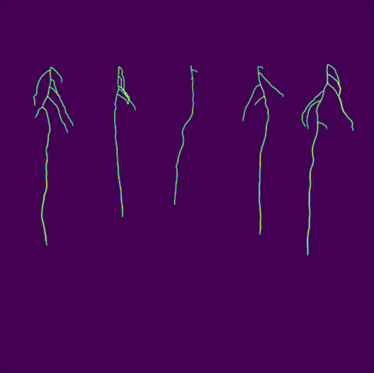
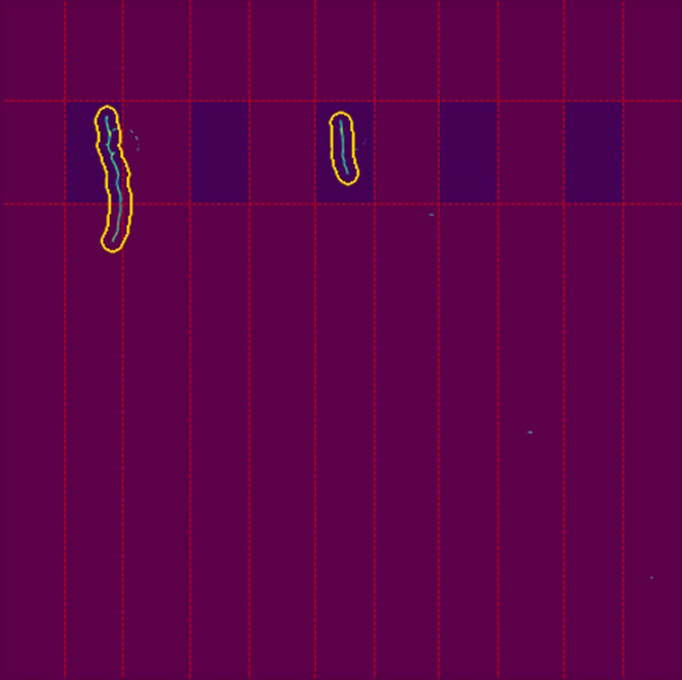
The system we developed removes the researcher from the inoculation loop entirely. Each day, the facility’s existing cameras photograph every Petri dish. A computer vision model then analyses those images, identifying the roots of each individual plant and pinpointing the precise tip of each root — the target for inoculation.

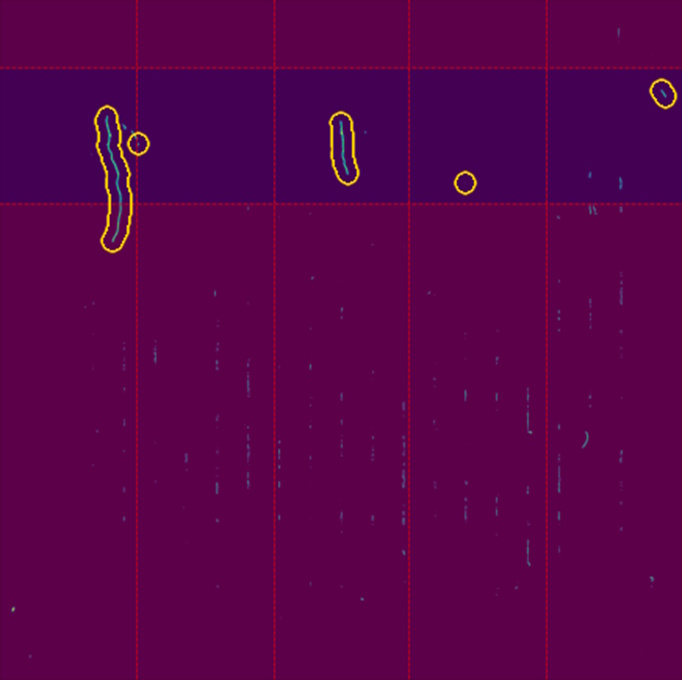
Getting this right was harder than it sounds. In early versions, the model incorrectly detected noise in the image as additional plants, leading to phantom root measurements. After iterative refinement, the model learned to distinguish real roots from artefacts reliably.
Once root tips are located, their coordinates are passed to a robot that moves a pipette to each position and dispenses the inoculant. We designed and tested two approaches to robot control: one based on a classical feedback loop, another using reinforcement learning. The classical approach delivered 100% success with sub-millimetre accuracy and became the basis for the delivered system, while the reinforcement learning approach showed promise for future development.
The Results
The delivered system fully automates a process that previously required constant manual effort. The robot positions itself within a millimetre of each root tip and dispenses inoculant without any human involvement, across every plant in every dish, in every experiment.
Beyond the numbers, the more significant outcome is consistency. Every seedling is inoculated at the same position, with the same timing, under the same conditions. That reproducibility is what makes the experimental results scientifically meaningful, and it was simply not achievable at this scale before.